


Mạng EtherCAT Là Gì? Cấu Trúc, Thiết Bị và Cách Cấu Hình Trên PLC Xinje
1. Mạng EtherCAT Là Gì? Vì Sao Được Ưa Chuộng Trong Tự Động Hóa?
Trong hệ thống điều khiển chuyển động tốc độ cao, giao thức truyền thông qua mạng EtherCAT là một lựa chọn đáp ứng được các tiêu chí khắt khe về độ chính xác, tốc độ đồng bộ thời gian thực, khả năng mở rộng và độ tin cậy.
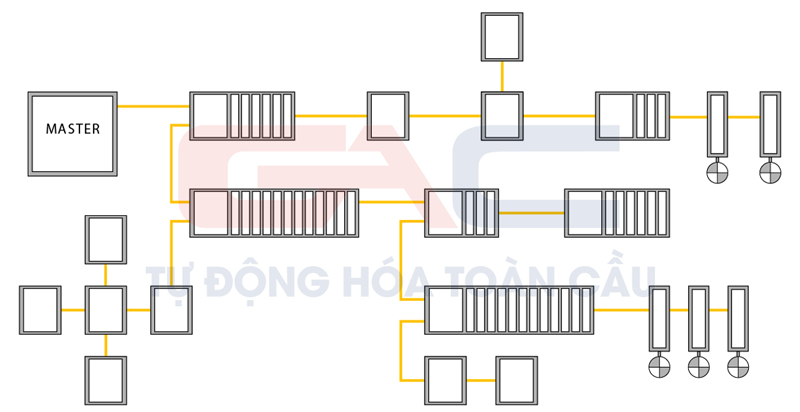
Công nghệ EtherCAT cung cấp các tùy chọn cấu trúc mạng linh hoạt, khiến nó trở thành lựa chọn tuyệt vời cho các mạng lớn và phức tạp.
Mạng EtherCAT chứa một thiết bị chính điều khiển mạng và các thiết bị phụ tiếp theo. Các thiết bị phụ thường có hai hoặc nhiều cổng cho phép chúng được kết nối với nhau. Các khả năng về cấu trúc mạng bao gồm đường, cây, sao—hoặc bất kỳ sự kết hợp nào trong số đó.
Vì EtherCAT hoạt động ở chế độ song công hoàn toàn—tận dụng cặp đường trong cáp Ethernet hai chiều—bất kỳ cấu trúc nào cũng có thể duy trì cấu trúc vòng logic, nghĩa là khung sẽ luôn có thể quay lại thiết bị chính sau khi được gửi đi. Tính linh hoạt này cũng loại bỏ nhu cầu về bộ chuyển mạch mạng.
Như vậy, EtherCAT được ưa chuộng bởi mang những ưu điểm vượt trội:
-
Đồng bộ thời gian thực
-
Độ chính xác cao
-
Mở rộng linh hoạt
-
Độ tin cậy lớn
-
Giảm chi phí hệ thống (do không cần switch)
2. Cấu hình phần cứng của hệ Ethercat
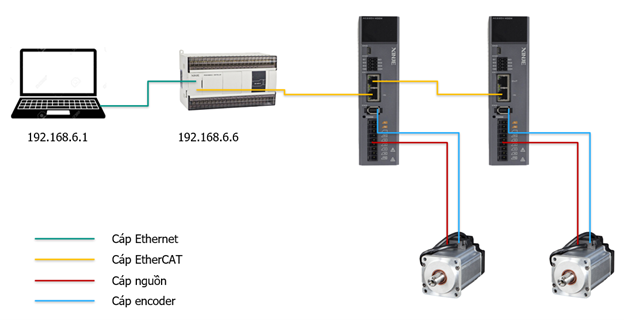
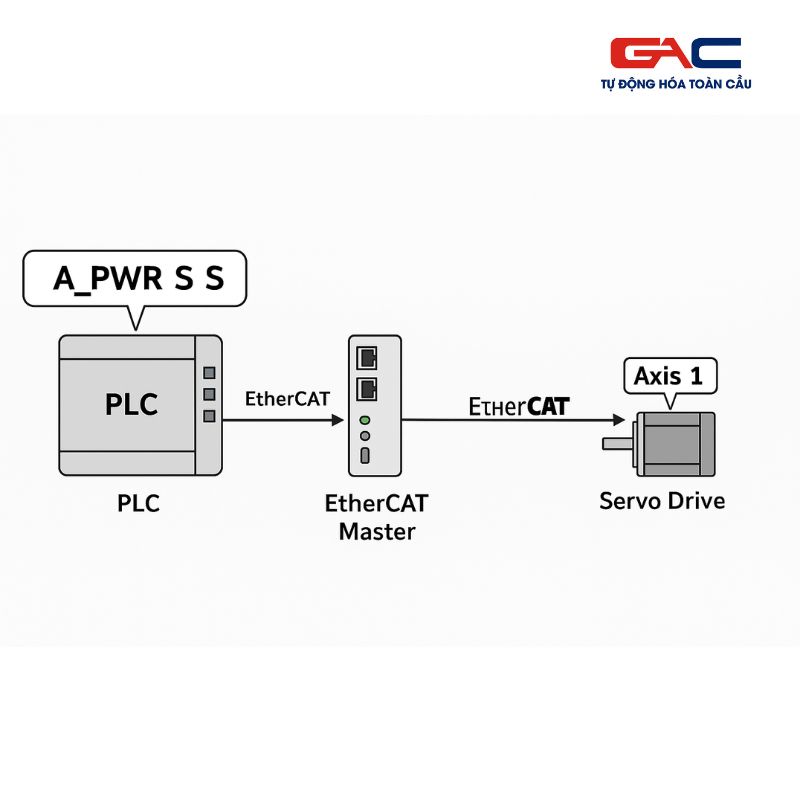
Kiến trúc hệ thống của một hệ EtherCAT có thể được chia thành ba thành phần chính: tệp cấu hình ENI (EtherCAT Network Information), thiết bị chủ EtherCAT master và thiết bị tớ EtherCAT slave.

– Tệp ENI (EtherCAT Network Information): Tệp cấu hình EtherCAT được thiết bị chủ sử dụng để cấu hình và khởi tạo mạng EtherCAT. Tệp cấu hình chứa thông tin chi tiết về cấu hình slave và cấu trúc mạng.
– Thiết bị chủ (PLC Xinje đóng vai trò Master): Còn được gọi là thiết bị EtherCAT master, chịu trách nhiệm quản lý mạng EtherCAT, trao đổi dữ liệu với các thiết bị tớ và giao tiếp với các ứng dụng bên ngoài.
– Thiết bị tớ (Servo, I/O…): Được gọi là thiết bị EtherCAT slave, thường là cảm biến, bộ điều khiển truyền động, và I/O kỹ thuật số/tương tự đơn giản, thực hiện các tác vụ cụ thể trong hệ thống tự động hóa.
3. Danh Sách Thiết Bị Được Sử Dụng Trong Hệ Thống
Thiết bị phần cứng
| STT | Mã hiệu | Mô tả | Số lượng |
| 1 | XDH-60A64-E | Bộ điều khiển 60 đầu vào/ra, tích hợp cổng mạng Ethernet và EtherCAT | 1 |
| 2 | DS5C1-20P7-PTA | Driver điều khiển động cơ Servo 0.7kW, tích hợp cổng truyền thông mạng EtherCAT | 2 |
| 3 | MS6H-80CS30B1-20P7 | Động cơ servo 0.7kW | 2 |
| 4 | CM-P07A-M-03 | Cáp động cơ dài 3m | 2 |
| 5 | CP-SP-M-03 | Cáp encoder dài 3m | 2 |
| 6 | JC-CB-0P3 | Cáp EtherCAT 30cm | 1 |
| 7 | JC-CB-1P5 | Cáp EtherCAT 150cm | 1 |
Phần mềm: XINJE PLC program tool đã được cài đặt trên máy tính cá nhân.
4.Tài liệu liên quan
- Xinje PLC Catalog : Download
- XDXL Hardware Manual: Download
- XDXL Instruction Manual (lệnh cơ bản): Download
- XDXL Positioning Manual (lệnh điều khiển xung) : Download
- XDHXLH Motion Control Manual (lệnh điều khiển mạng) : Download
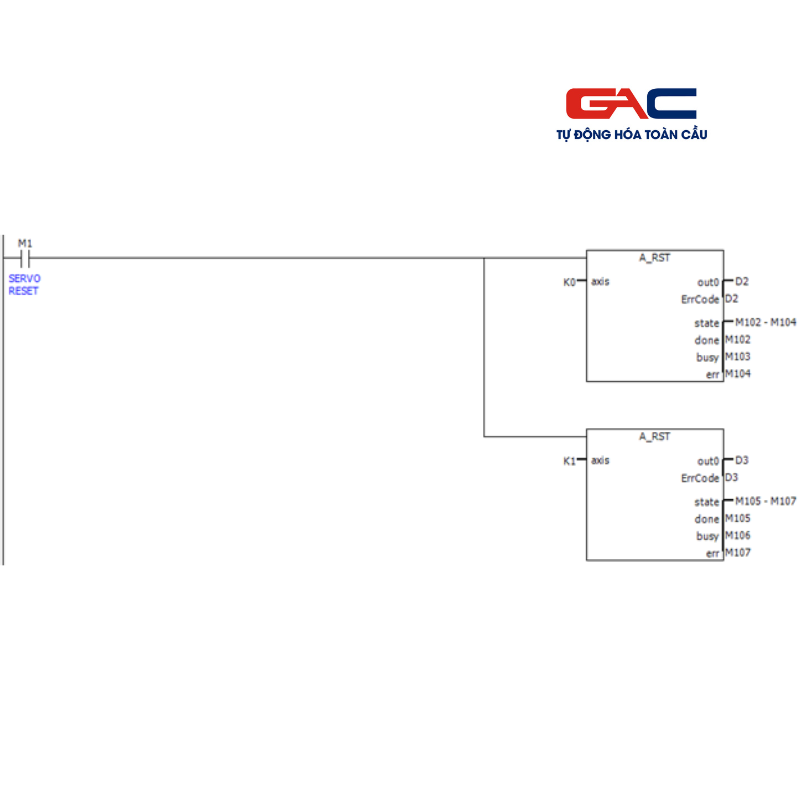
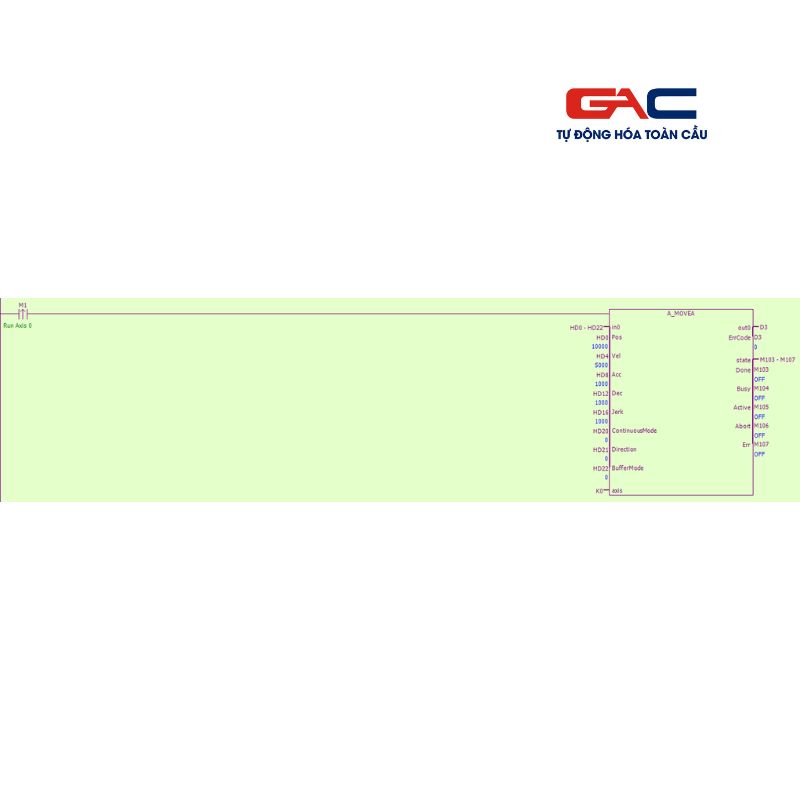
Tài liệu “XDHXLH Motion Control Manual” là tài liệu về tập lệnh lập trình trực tiếp cho chuẩn EtherCAT của PLC Xinje


 Zalo Miền Bắc
Zalo Miền Bắc