


Truyền thông PLC CANopen: Giải pháp điều khiển tốc độ cao
Tìm hiểu chi tiết về truyền thông PLC CANopen, cấu trúc mạng, ưu điểm và ứng dụng thực tế trong điều khiển Servo, biến tần. Hotline hỗ trợ: 0961320333.
Giới thiệu
Trong kỷ nguyên công nghiệp 4.0, việc tối ưu hóa tốc độ truyền nhận dữ liệu và độ tin cậy của hệ thống điều khiển là ưu tiên hàng đầu của mọi kỹ sư tự động hóa. Giữa hàng loạt các giao thức công nghiệp như Modbus RTU, Profibus hay EtherCAT, truyền thông PLC CANopen nổi lên như một giải pháp cân bằng hoàn hảo giữa chi phí, hiệu năng và khả năng mở rộng. Đặc biệt, trong các ứng dụng điều khiển đa trục sử dụng động cơ servo và biến tần, CANopen chứng minh được sức mạnh vượt trội nhờ kiến trúc linh hoạt và khả năng xử lý thời gian thực mạnh mẽ.
Giao thức CANopen và lịch sử phát triển
Để hiểu rõ về truyền thông PLC CANopen, trước hết chúng ta cần phân biệt giữa CAN (Controller Area Network) và CANopen. CAN ban đầu được Robert Bosch GmbH phát triển cho ngành công nghiệp ô tô nhằm thay thế hệ thống dây dẫn phức tạp trong xe hơi. Tuy nhiên, nhờ khả năng chống nhiễu cực tốt và tính tin cậy cao, nó đã được đưa vào môi trường công nghiệp. Giao thức CANopen là gì? Thực chất, CANopen là một giao thức truyền thông lớp cao dựa trên nền tảng lớp vật lý CAN.
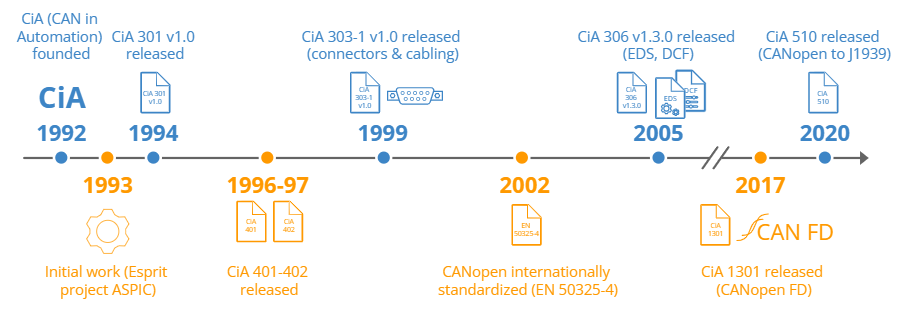
CANopen được chuẩn hóa bởi tổ chức CiA theo tiêu chuẩn EN 50325-4. Nếu CAN cung cấp “con đường” và “phương tiện” vận chuyển, thì CANopen cung cấp “luật lệ giao thông” và “ngôn ngữ” để các thiết bị như PLC, động cơ servo, biến tần và HMI có thể hiểu nhau. Giao thức này định nghĩa cách thức cấu hình thiết bị, cách dữ liệu được đóng gói và cách mạng được quản lý. Chính sự chuẩn hóa này giúp các thiết bị từ nhiều nhà sản xuất khác nhau có thể hoạt động đồng bộ trong cùng một hệ thống mà không gặp rào cản về tương thích.
Trong suốt hơn hai thập kỷ, CANopen đã trở thành tiêu chuẩn vàng trong các máy móc đóng gói, ngành y tế, xe tự hành AGV và đặc biệt là trong các hệ thống điều khiển chuyển động (Motion Control). Sự ra đời của các hồ sơ thiết bị như CiA 402 dành cho truyền động điện đã biến CANopen thành “vũ khí” đắc lực giúp các kỹ sư điều khiển hàng chục trục servo chỉ với một sợi cáp duy nhất.
Cấu trúc mạng CANopen và mô hình vật lý
Một hệ thống cấu trúc mạng CANopen điển hình tuân thủ mô hình phân lớp nghiêm ngặt để đảm bảo tính toàn vẹn của dữ liệu. Về mặt vật lý, mạng sử dụng đôi dây xoắn gồm hai tín hiệu đối xứng: CAN_H (High) và CAN_L (Low). Việc sử dụng hiệu số điện áp giữa hai dây này giúp tín hiệu cực kỳ ổn định, ngay cả trong môi trường nhà máy có nhiều nhiễu điện từ từ biến tần hay động cơ công suất lớn.
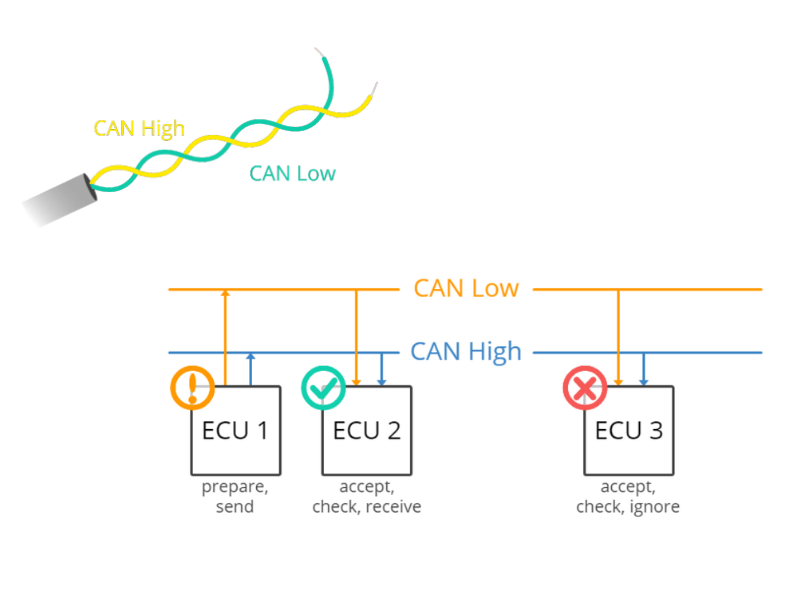
Đặc điểm quan trọng nhất trong cấu trúc vật lý là điện trở đầu cuối (Termination Resistor). Tại hai điểm xa nhất của mạng, chúng ta bắt buộc phải lắp đặt điện trở 120Ω để triệt tiêu hiện tượng phản xạ tín hiệu trên đường truyền. Nếu thiếu điện trở này, hệ thống sẽ gặp lỗi truyền thông chập chờn hoặc không thể kết nối. Khoảng cách truyền dẫn của CANopen phụ thuộc trực tiếp vào tốc độ Baudrate:
- Với tốc độ 1 Mbps, chiều dài cáp tối đa là 40m.
- Với tốc độ 125 kbps, chiều dài cáp có thể lên đến 500m.
Mỗi thiết bị trong mạng được định danh bằng một Node-ID duy nhất (từ 1 đến 127). Khác với Modbus RTU thường chỉ có một Master điều phối tất cả, CANopen hỗ trợ cơ chế đa chủ hoặc cơ chế ưu tiên dựa trên định danh bức điện (COB-ID). Điều này cho phép các thông điệp quan trọng như tín hiệu dừng khẩn cấp được ưu tiên truyền đi trước các dữ liệu trạng thái thông thường, đảm bảo tính an toàn tối đa cho hệ thống tự động hóa.
Object Dictionary trong CANopen – Trái tim của thiết bị
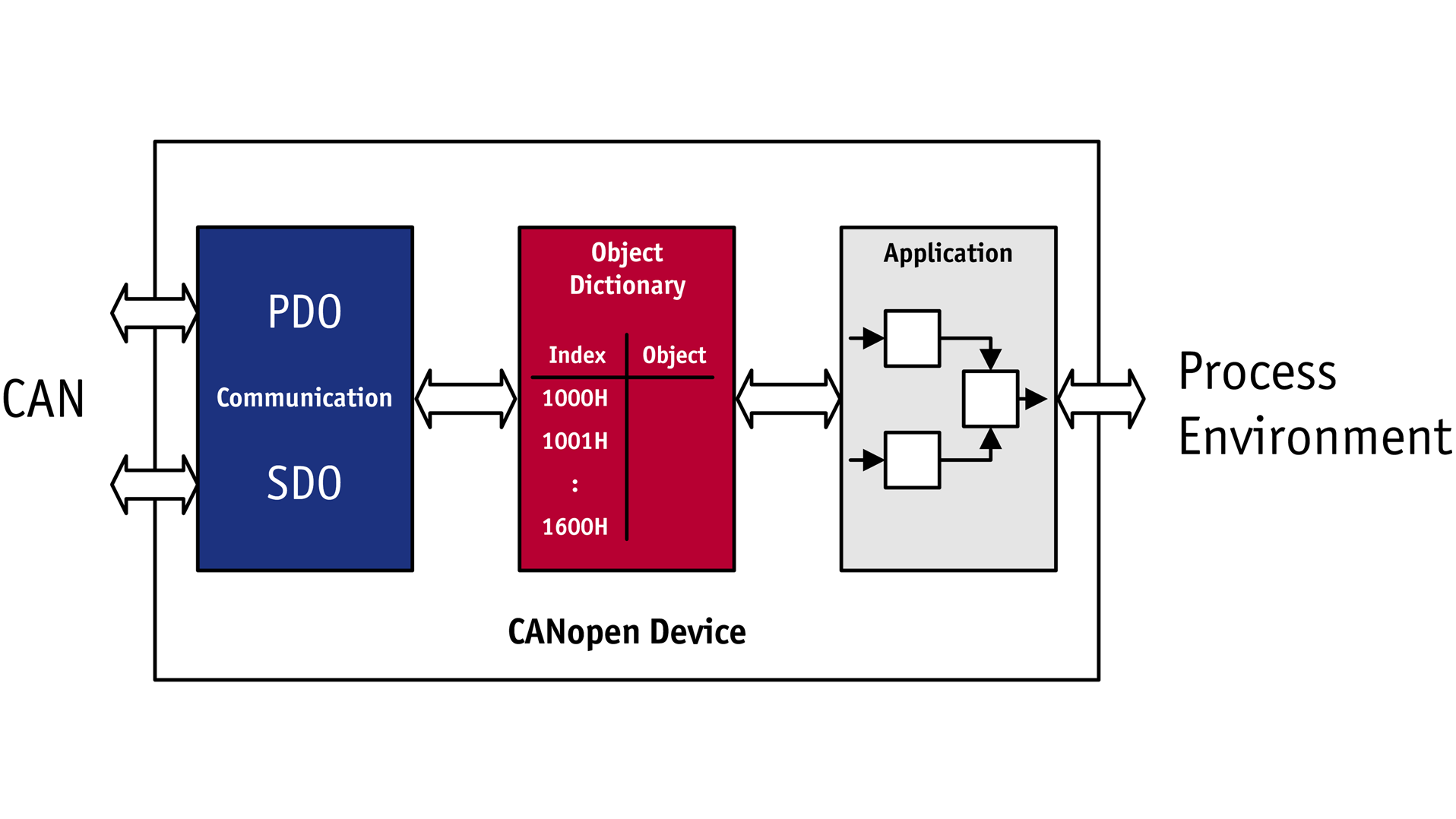
Nếu phải chỉ ra thành phần quan trọng nhất giúp CANopen trở nên mạnh mẽ và linh hoạt, đó chính là Object Dictionary trong CANopen (Từ điển đối tượng). Đây là một cấu trúc dữ liệu được lưu trữ trong mỗi thiết bị, đóng vai trò như một cầu nối giữa các thông số phần cứng bên trong và mạng truyền thông bên ngoài. Mỗi thông số như tốc độ động cơ, dòng điện, vị trí hiện tại hay cấu hình bộ lọc đều được gán cho một Index (16-bit) và Sub-index (8-bit) cụ thể.
Object Dictionary được chia thành các vùng chức năng riêng biệt:
- 0000h – 0FFFh: Kiểu dữ liệu cơ bản.
- 1000h – 1FFFh: Vùng giao tiếp, chứa các cài đặt về Node-ID, thời gian chu kỳ.
- 6000h – 9FFFh: Vùng hồ sơ thiết bị, ví dụ các thông số điều khiển servo theo chuẩn CiA 402.
Khi kỹ sư lập trình PLC, thay vì phải nhớ các địa chỉ thanh ghi phức tạp như trong Modbus, bạn chỉ cần truy cập vào đúng Index trong Object Dictionary. Điều này mang lại tính đồng nhất rất cao. Ví dụ, nếu bạn điều khiển một bộ servo của hãng Delta và sau đó chuyển sang dùng servo của Xinje, các chỉ số Index cho lệnh chạy hay đọc trạng thái thường vẫn tuân theo quy chuẩn chung, giúp tiết kiệm đáng kể thời gian chuyển đổi dự án và lập trình.
Cơ chế truyền dữ liệu PDO và SDO
Để tối ưu hóa hiệu suất, truyền thông PLC CANopen sử dụng hai phương thức truyền dữ liệu chính là PDO (Process Data Objects) và SDO (Service Data Objects). Hiểu rõ sự khác biệt giữa hai cơ chế này là chìa khóa để thiết kế một hệ thống chạy mượt mà, không bị nghẽn mạng.
PDO (Process Data Objects)
Được sử dụng cho các dữ liệu thời gian thực có tính lặp lại cao. Dữ liệu PDO được truyền đi mà không cần xác nhận từ phía nhận, giúp giảm thiểu độ trễ. Ví dụ, việc gửi lệnh vị trí từ PLC xuống động cơ servo hoặc đọc giá trị vòng quay từ biến tần sẽ được thực hiện qua PDO. PDO lại được chia thành TPDO (Transmit PDO – thiết bị gửi đi) và RPDO (Receive PDO – thiết bị nhận vào). Cơ chế “Mapping” cho phép chúng ta gom nhiều thông số từ Object Dictionary vào một gói tin PDO duy nhất để tối ưu băng thông.
SDO (Service Data Objects)
Được sử dụng cho mục đích cấu hình hoặc đọc các dữ liệu không yêu cầu tốc độ cao. Khác với PDO, SDO yêu cầu cơ chế xác nhận. Mỗi khi PLC gửi một yêu cầu SDO, thiết bị nhận phải gửi lại một phản hồi xác nhận đã nhận được dữ liệu thành công. Chúng ta thường dùng SDO để cài đặt các thông số ban đầu khi khởi động máy (như dòng điện định mức, giới hạn tốc độ) hoặc để đọc các mã lỗi khi hệ thống gặp sự cố. Việc lạm dụng SDO cho các tác vụ điều khiển sẽ khiến mạng bị chậm lại do thủ tục xác nhận tốn nhiều thời gian.
Ưu điểm của CANopen so với các giao thức khác
Khi so sánh với các chuẩn truyền thông phổ biến, ưu điểm của CANopen thể hiện rõ nhất ở khả năng chịu lỗi và tính linh hoạt trong cấu hình. So với Modbus RTU truyền thống, CANopen nhanh hơn gấp nhiều lần và hỗ trợ cấu trúc dữ liệu phức tạp hơn. Trong khi Modbus RTU chỉ có thể truyền các giá trị 16-bit đơn giản, CANopen cho phép quản lý cả một hệ thống đối tượng thông qua Object Dictionary.
So với các mạng dựa trên Ethernet như Profinet hay EtherCAT, dù CANopen có băng thông thấp hơn (tối đa 1 Mbps so với 100 Mbps), nhưng nó lại chiếm ưu thế tuyệt đối về chi phí triển khai và độ bền cơ khí. Cáp CANopen chuyên dụng có khả năng chịu uốn và nhiễu tốt hơn cáp mạng thông thường trong các ứng dụng chuyển động liên tục. Hơn nữa, việc triển khai một hệ thống nhỏ và trung bình với 4-8 trục servo qua CANopen thường tiết kiệm chi phí phần cứng (Module truyền thông) lên tới 30-50% so với sử dụng EtherCAT.
Ngoài ra, khả năng “Plug and Play” thông qua tệp tin EDS giúp việc cấu hình mạng CANopen trở nên cực kỳ đơn giản. Tệp EDS chứa toàn bộ thông tin về Object Dictionary của thiết bị. Kỹ sư chỉ cần import tệp này vào phần mềm lập trình PLC, các tham số sẽ tự động hiển thị, loại bỏ hoàn toàn việc tra cứu thủ công và nhập sai địa chỉ thanh ghi.
Ứng dụng kết nối PLC với Servo qua CANopen thực tế
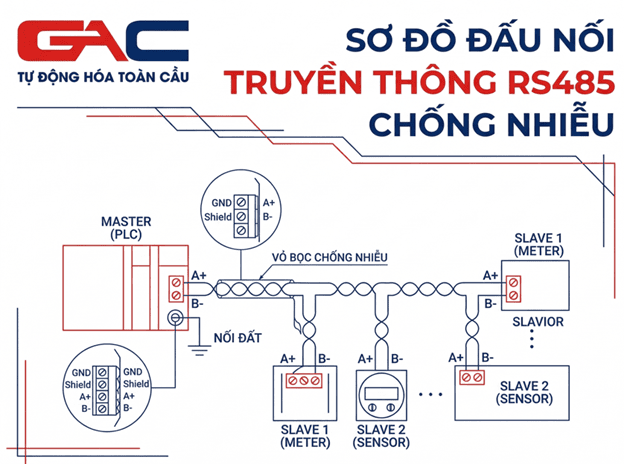
Trong thực tế, việc kết nối PLC với Servo qua CANopen là giải pháp phổ biến nhất trong các dòng máy cắt bao bì, máy đóng gói trà túi lọc hoặc các dây chuyền dán nhãn tự động. Hãy lấy ví dụ về một hệ thống điều khiển 4 trục servo sử dụng PLC Xinje.
Thay vì phải đấu nối hàng chục sợi dây phát xung từ PLC đến từng Driver Servo, chúng ta chỉ cần một sợi cáp mạng 2 lõi đi từ PLC đến Driver thứ nhất, sau đó nối tiếp sang các Driver còn lại. Việc này không chỉ giảm thiểu sai sót do đấu nối mà còn giúp tủ điện trở nên gọn gàng, chuyên nghiệp hơn rất nhiều. Qua giao thức CANopen, PLC có thể gửi lệnh đồng bộ vị trí cho cả 4 trục với độ chính xác micro giây, điều mà các giao thức Modbus thông thường không bao giờ làm được.
Bên cạnh Servo, việc điều khiển biến tần qua CANopen cũng mang lại hiệu quả cao. PLC có thể đọc về dòng điện, điện áp, tần số và nhiệt độ của biến tần liên tục để đưa ra các cảnh báo sớm về bảo trì. Thậm chí, khi một bộ driver bị hỏng và cần thay thế, nhờ tính năng lưu trữ cấu hình trong Object Dictionary, PLC có thể tự động nạp lại các tham số cài đặt cho driver mới ngay khi nó được kết nối vào mạng, giúp giảm thiểu tối đa thời gian dừng máy.
Quy trình cấu hình mạng CANopen và các lưu ý kỹ thuật
Để triển khai một hệ thống thành công, việc cấu hình mạng CANopen cần tuân thủ các bước nghiêm ngặt sau đây:
- Thiết lập phần cứng: Đảm bảo tất cả các thiết bị trong mạng có chung một mức tốc độ Baudrate (ví dụ 500kbps) và các Node-ID không được trùng nhau. Kiểm tra kỹ việc lắp đặt điện trở đầu cuối 120Ω ở hai đầu cáp.
- Import file EDS: Tải tệp EDS từ trang web của nhà sản xuất thiết bị (Servo, biến tần, module I/O) và đưa vào phần mềm cấu hình mạng của PLC.
- Cấu hình PDO Mapping: Lựa chọn các đối tượng cần truyền nhận thường xuyên (như Control Word, Target Position, Status Word, Actual Position) và gán chúng vào các bộ PDO.
- Lập trình NMT (Network Management): Viết lệnh để PLC chuyển trạng thái mạng từ “Pre-operational” sang “Operational” sau khi khởi động. Chỉ ở trạng thái Operational, dữ liệu PDO mới bắt đầu được truyền nhận.
- Xử lý lỗi: Lập trình các đoạn code để bắt lỗi Heartbeat (mất kết nối giữa PLC và thiết bị) hoặc lỗi Emergency (thiết bị báo lỗi nội bộ) để có biện pháp dừng máy an toàn.
Một lưu ý kỹ thuật quan trọng: Luôn sử dụng nguồn DC chất lượng cao (như nguồn gắn thanh ray hoặc nguồn tổ ong GAC có bộ lọc nhiễu tốt) để cấp cho mạch logic của các thiết bị truyền thông. Sự sụt áp đột ngột hoặc nhiễu nguồn có thể khiến chip truyền thông CAN bị “treo”, dẫn đến mất kết nối toàn bộ hệ thống.
Kết luận và giải pháp từ Tự Động Hóa Toàn Cầu
Truyền thông PLC CANopen thực sự là một giải pháp mạnh mẽ, ổn định và tối ưu chi phí cho các hệ thống tự động hóa hiện đại. Việc làm chủ công nghệ này không chỉ giúp các kỹ sư nâng cao hiệu suất làm việc mà còn giúp doanh nghiệp xây dựng được những hệ thống máy móc có tính cạnh tranh cao, dễ dàng bảo trì và nâng cấp. Từ việc điều khiển động cơ bước, động cơ servo cho đến quản lý biến tần và các module I/O xa, CANopen vẫn luôn khẳng định được vị thế không thể thay thế của mình.
Tại Tự Động Hóa Toàn Cầu, với đội ngũ kỹ sư hơn 10 năm kinh nghiệm, chúng tôi chuyên cung cấp các giải pháp toàn diện về hệ thống truyền thông công nghiệp. Chúng tôi sẵn sàng tư vấn, thiết kế và cung cấp các thiết bị từ PLC, biến tần, servo đến các loại nguồn tổ ong, nguồn gắn thanh ray và hộp số giảm tốc chất lượng cao, đảm bảo tính tương thích tuyệt đối cho mạng CANopen của bạn.

Bạn đang cần tư vấn giải pháp truyền thông PLC CANopen cho hệ thống của mình?
Đừng ngần ngại liên hệ ngay với chúng tôi để được hỗ trợ kỹ thuật chuyên sâu và nhận báo giá tốt nhất.
- Hotline Zalo miền Bắc: 0961.320.333
- Hotline Zalo miền Nam: 0931.866.800
- Website: tudonghoatoancau.com


 Zalo Miền Bắc
Zalo Miền Bắc