



Yêu cầu bộ hộp số giảm tốc cho cánh tay robot công nghiệp
Phân tích đầy đủ yêu cầu kỹ thuật của bộ hộp số giảm tốc cho cánh tay robot công nghiệp, đảm bảo độ chính xác, độ bền và hiệu suất vận hành lâu dài.
Giới thiệu
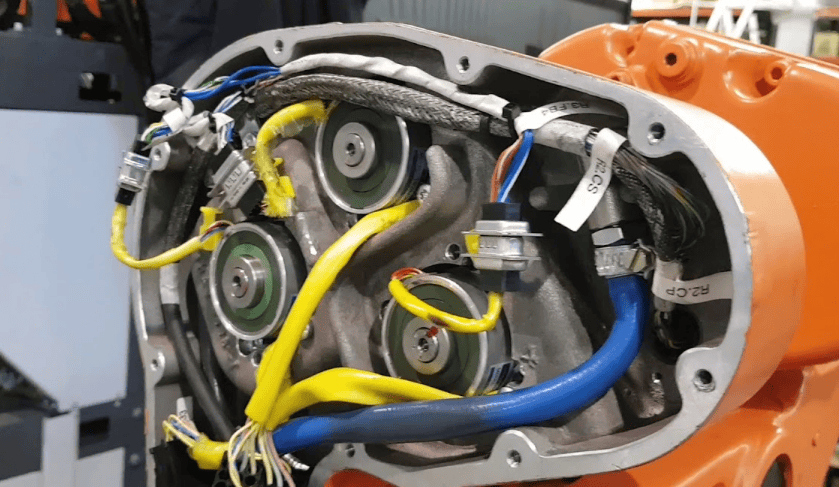
Trong các hệ thống robot công nghiệp hiện đại, bộ hộp số giảm tốc giữ vai trò then chốt, ảnh hưởng trực tiếp đến độ chính xác chuyển động, khả năng chịu tải và tuổi thọ của toàn bộ cánh tay robot. Không giống các ứng dụng truyền động thông thường, robot công nghiệp phải làm việc với tần suất cao, chuyển động đa trục phức tạp và yêu cầu sai số cực thấp trong suốt vòng đời vận hành.
Chính vì vậy, việc lựa chọn bộ hộp số giảm tốc cho cánh tay robot không thể áp dụng tư duy “chọn đủ tải” đơn giản, mà cần được phân tích trên nhiều khía cạnh kỹ thuật như độ rơ, độ cứng xoắn, khả năng chịu tải động, thiết kế cơ khí và khả năng tương thích với hệ servo điều khiển.
1. Vai trò của bộ hộp số giảm tốc trong cánh tay robot công nghiệp
Trong kết cấu robot, hộp số không chỉ là phần tử truyền động mà còn là yếu tố quyết định chất lượng chuyển động và độ ổn định của toàn hệ thống.
1.1. Truyền và khuếch đại mô men xoắn cho các khớp robot
Động cơ servo trong robot thường có tốc độ quay cao nhưng mô men xoắn tương đối thấp. Bộ hộp số giảm tốc có nhiệm vụ:
- Giảm tốc độ quay xuống mức phù hợp với từng khớp robot.
- Khuếch đại mô men xoắn để robot có thể nâng, giữ và thao tác với tải trọng lớn.
- Phân phối mô men ổn định trong các chu kỳ tăng giảm tốc liên tục.
Nếu hộp số không được thiết kế đúng, động cơ servo sẽ phải làm việc gần giới hạn, dẫn đến quá nhiệt và giảm tuổi thọ tổng thể của hệ truyền động.
1.2. Quyết định độ chính xác và độ lặp lại chuyển động
Trong robot công nghiệp, độ chính xác vị trí và độ lặp lại là các chỉ tiêu kỹ thuật cốt lõi. Sai số truyền động trong bộ hộp số giảm tốc sẽ trực tiếp chuyển hóa thành sai lệch tại đầu công tác của robot.
Các yếu tố như độ rơ, độ đàn hồi và độ cứng của hộp số ảnh hưởng mạnh đến:
- Độ chính xác khi robot dừng và giữ vị trí.
- Độ ổn định quỹ đạo trong các chuyển động liên tục.
- Chất lượng thao tác trong các ứng dụng hàn, lắp ráp và gia công chính xác.
2. Yêu cầu về độ chính xác và độ rơ của hộp số
Độ chính xác là tiêu chí phân biệt rõ ràng giữa hộp số robot và hộp số dùng cho truyền động thông thường.
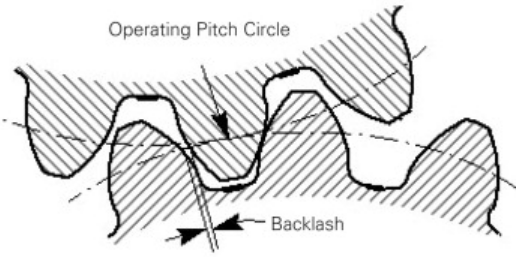
2.1. Độ rơ thấp để đảm bảo độ chính xác vị trí
Độ rơ là khoảng trễ góc khi đảo chiều hoặc thay đổi hướng chuyển động. Đối với robot đa trục, độ rơ tích lũy tại nhiều khớp có thể gây sai lệch lớn tại đầu robot.
Bộ hộp số giảm tốc cho cánh tay robot cần:
- Có độ rơ cực thấp, thường ở mức rất nhỏ.
- Duy trì độ rơ ổn định trong suốt vòng đời vận hành.
- Hạn chế mài mòn làm tăng độ rơ theo thời gian.
Đây là lý do các thiết kế hộp số robot thường sử dụng kết cấu đặc biệt và công nghệ gia công chính xác cao.
2.2. Độ cứng xoắn cao
Độ cứng xoắn phản ánh mức độ biến dạng của hộp số khi chịu tải. Với robot công nghiệp, độ cứng xoắn cao giúp:
- Giảm độ trễ phản hồi khi servo thay đổi tốc độ hoặc hướng quay.
- Duy trì chính xác quỹ đạo chuyển động trong thao tác nhanh.
- Hạn chế rung động khi robot mang tải lớn.
Một bộ hộp số giảm tốc có độ cứng xoắn thấp sẽ khiến hệ điều khiển phải bù trừ liên tục, làm giảm hiệu quả và độ ổn định của toàn hệ thống.
3. Yêu cầu về khả năng chịu tải và mô men
Cánh tay robot phải làm việc trong điều kiện tải phức tạp hơn nhiều so với các hệ truyền động tĩnh.
3.1. Chịu tải tĩnh và tải động liên tục
Ngoài tải trọng làm việc, robot còn phải chịu:
- Trọng lượng bản thân của các khâu phía trước.
- Lực quán tính khi tăng tốc và giảm tốc nhanh.
- Tải lệch tâm trong các tư thế làm việc khác nhau.
Do đó, bộ hộp số giảm tốc phải được thiết kế để làm việc ổn định với tải biến thiên liên tục, không chỉ tại một điểm tải danh định.
3.2. Khả năng chịu mô men quá tải
Trong thực tế vận hành, robot có thể gặp va chạm, kẹt phôi hoặc lỗi lập trình. Khi đó, mô men tác động lên hộp số có thể tăng đột ngột.
Hộp số cho robot cần:
- Có biên độ an toàn đủ lớn cho mô men quá tải ngắn hạn.
- Tránh biến dạng vĩnh viễn hoặc hư hỏng bánh răng khi xảy ra sự cố.
- Bảo vệ các thành phần cơ khí phía trước và phía sau trong chuỗi truyền động.
4. Yêu cầu về độ bền và tuổi thọ vận hành
Robot công nghiệp thường được thiết kế cho thời gian khai thác dài, nhiều năm vận hành liên tục.
4.1. Tuổi thọ phù hợp với chu kỳ làm việc của robot
Một bộ hộp số giảm tốc không đạt tuổi thọ yêu cầu sẽ trở thành điểm yếu của toàn bộ hệ thống robot. Việc thay thế hộp số không chỉ tốn chi phí mà còn gây gián đoạn sản xuất.
Hộp số robot cần:
- Đáp ứng số giờ vận hành lớn với tải biến thiên.
- Duy trì đặc tính cơ học ổn định theo thời gian.
- Có chu kỳ bảo trì phù hợp với kế hoạch sản xuất.
4.2. Vật liệu và công nghệ gia công bánh răng
Độ bền của hộp số phụ thuộc rất lớn vào vật liệu và công nghệ chế tạo bánh răng. Các yêu cầu kỹ thuật thường bao gồm:
- Thép hợp kim chất lượng cao cho bánh răng và trục.
- Xử lý nhiệt tối ưu để tăng độ cứng bề mặt và độ bền mỏi.
- Gia công chính xác cao nhằm giảm ma sát và tiếng ồn.
Những yếu tố này giúp bộ hộp số giảm tốc duy trì hiệu suất và độ chính xác trong suốt vòng đời sử dụng.
5. Yêu cầu về kích thước, khối lượng và thiết kế cơ khí
Không gian lắp đặt trên cánh tay robot luôn là bài toán khó về cơ khí.
5.1. Kích thước nhỏ gọn, mật độ công suất cao
Robot công nghiệp yêu cầu hộp số có khả năng truyền mô men lớn trong kích thước hạn chế. Điều này đòi hỏi:
- Thiết kế tối ưu hóa không gian bên trong.
- Mật độ công suất cao so với thể tích.
- Dễ dàng tích hợp vào kết cấu tổng thể của cánh tay robot.
5.2. Khối lượng thấp để giảm quán tính
Khối lượng của bộ hộp số giảm tốc ảnh hưởng trực tiếp đến quán tính chuyển động. Hộp số nhẹ giúp:
- Robot tăng tốc và giảm tốc nhanh hơn.
- Giảm tải cho các khớp phía trước.
- Tiết kiệm năng lượng và nâng cao độ chính xác động.
6. Yêu cầu về độ ồn, độ rung và khả năng tương thích điều khiển
Ngoài các yếu tố cơ học, hộp số robot còn phải đáp ứng yêu cầu về chất lượng vận hành.
6.1. Vận hành êm ái, độ ồn thấp
Trong dây chuyền tự động hóa hiện đại, rung động và tiếng ồn có thể ảnh hưởng đến chất lượng sản phẩm và môi trường làm việc. Bộ hộp số giảm tốc cho robot cần:
- Bánh răng có biên dạng tối ưu, ăn khớp êm.
- Độ chính xác lắp ráp cao để hạn chế rung động.
- Hoạt động ổn định ở tốc độ và tần suất cao.
6.2. Tương thích với động cơ servo và hệ điều khiển
Hộp số robot phải tương thích chặt chẽ với động cơ servo và thuật toán điều khiển. Điều này đảm bảo:
- Phản hồi nhanh theo tín hiệu điều khiển.
- Dễ dàng tinh chỉnh và tối ưu hệ servo.
- Khai thác tối đa khả năng của động cơ và bộ điều khiển.
Đây cũng là lý do nhiều kỹ sư thường đặt câu hỏi hộp số giảm tốc là gì và vì sao hộp số dùng cho servo lại có yêu cầu khắt khe hơn rất nhiều so với truyền động thông thường.
Kết luận
Trong các hệ thống robot công nghiệp, đặc biệt là cánh tay robot và các cơ cấu chuyển động phụ trợ, bộ hộp số giảm tốc đóng vai trò then chốt trong việc đảm bảo độ chính xác vị trí, độ ổn định chuyển động và tuổi thọ vận hành lâu dài. Các yêu cầu như độ rơ thấp, độ cứng xoắn cao, khả năng chịu tải động tốt, thiết kế nhỏ gọn và vận hành êm ái không chỉ áp dụng cho robot mà còn là tiêu chuẩn chung của các hệ truyền động servo chính xác trong tự động hóa hiện đại.

Xuất phát từ những yêu cầu kỹ thuật đó, dòng hộp số hành tinh servo GAC do Công ty Cổ phần Tự Động Hóa Toàn Cầu phân phối chính hãng được phát triển để đáp ứng hiệu quả các ứng dụng servo công nghiệp có chuyển động chính xác, bao gồm cả các cơ cấu truyền động trong hệ thống robot, máy tự động và dây chuyền sản xuất thông minh. Với ưu điểm độ rơ thấp, độ cứng xoắn cao, khả năng chịu tải động ổn định và khả năng tương thích tốt với động cơ servo, hộp số GAC là lựa chọn phù hợp giúp doanh nghiệp tối ưu hiệu suất, độ tin cậy và giá trị đầu tư cho các hệ truyền động hiện đại.
 Liên hệ ngay: 0961320333 để nhận bảng giá ưu đãi chiết khấu dành cho khách hàng doanh nghiệp.
Liên hệ ngay: 0961320333 để nhận bảng giá ưu đãi chiết khấu dành cho khách hàng doanh nghiệp.
📌 Xem thêm: 5 sai lầm cần tránh khi chọn bộ hộp số giảm tốc







 Zalo Miền Bắc
Zalo Miền Bắc
