


Hướng dẫn dò tham số PID trong ứng dụng ổn định áp suất đường ống nước
Hướng dẫn chi tiết cách dò tham số PID để ổn định áp suất đường ống nước bằng phương pháp Ziegler-Nichols, giúp hệ thống vận hành êm ái và tiết kiệm điện năng.
1. Giới thiệu
Trong kỷ nguyên công nghiệp hóa, việc tối ưu hóa hệ thống cấp nước không chỉ dừng lại ở việc bơm nước mà còn là nghệ thuật điều khiển sự ổn định. Kỹ thuật dò tham số PID đóng vai trò xương sống trong việc duy trì áp suất hằng số, giúp bảo vệ đường ống và tiết kiệm năng lượng. Khi lưu lượng nước tiêu thụ thay đổi đột ngột, bộ điều khiển PID sẽ tính toán để điều chỉnh tốc độ biến tần sao cho áp suất thực tế luôn bám sát giá trị cài đặt.
Việc hiểu rõ cách dò tham số PID chính xác sẽ giúp kỹ thuật viên tránh được các hiện tượng cực đoan như búa nước hay dao động áp suất liên tục, từ đó nâng cao hiệu suất vận hành cho toàn bộ hệ thống máy bơm công nghiệp hiện nay.
2. Tổng quan về bộ điều khiển PID trong hệ thống cấp nước
Bộ điều khiển PID là giải pháp phổ biến nhất trong tự động hóa nhờ tính linh hoạt và hiệu quả cao. Để thực hiện việc dò tham số PID thành công, trước hết chúng ta cần hiểu rõ cấu trúc của bộ điều khiển này trong môi trường thủy lực.
2.1. Khái niệm bộ điều khiển PID là gì
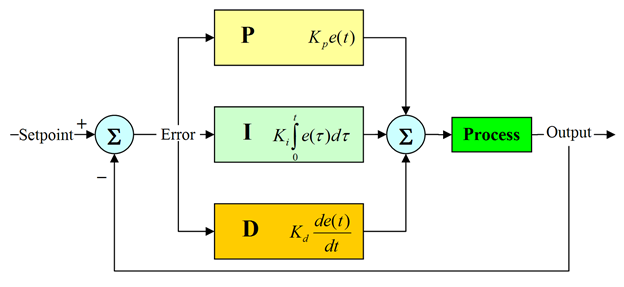
PID là viết tắt của ba thành phần Proportional (Tỉ lệ), Integral (Tích phân) và Derivative (Vi phân).
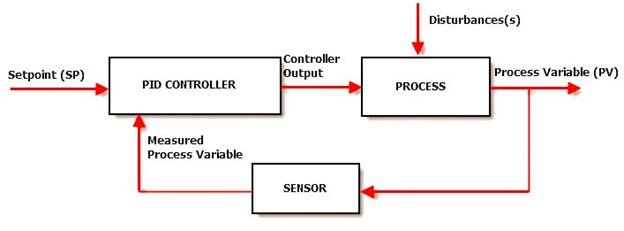
Trong ứng dụng ổn định áp suất, PID đóng vai trò là bộ não xử lý tín hiệu phản hồi từ cảm biến áp suất để điều khiển tốc độ biến tần, từ đó giữ cho áp suất trong đường ống luôn nằm ở giá trị cài đặt mong muốn bất kể lưu lượng nước tiêu thụ thay đổi. Quá trình dò tham số PID chính là việc tìm ra các hệ số tối ưu cho ba thành phần này.
2.2. Tại sao cần sử dụng PID cho áp suất đường ống
Nếu không có PID, bơm thường chạy ở tốc độ cố định hoặc điều khiển đóng cắt (On/Off) gây ra hiện tượng sụt áp hoặc tăng áp đột ngột. Kỹ thuật dò tham số PID giúp việc điều khiển tăng giảm tốc độ diễn ra mượt mà, bảo vệ đường ống khỏi hiện tượng búa nước và tiết kiệm điện năng tối ưu cho hệ thống máy bơm. Một hệ thống được dò tham số PID chuẩn xác sẽ giúp biến tần phản ứng nhanh nhạy nhưng không gây ra các xung áp suất nguy hiểm.
3. Ý nghĩa thực tế của các thông số P I và D
Mỗi thông số trong bộ PID đều ảnh hưởng trực tiếp đến hành vi của dòng nước. Việc dò tham số PID thực chất là sự cân bằng giữa tốc độ đáp ứng và sự ổn định của hệ thống.
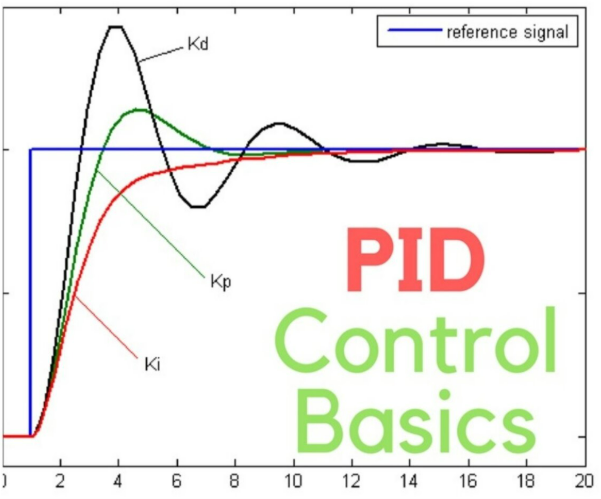
3.1. Thành phần tỉ lệ P và tác động tức thời
Thông số P quyết định mức độ phản ứng của hệ thống dựa trên sai lệch giữa áp suất thực tế và áp suất cài đặt. Trong quá trình dò tham số PID, nếu P quá lớn, bơm sẽ tăng tốc rất nhanh nhưng dễ gây ra hiện tượng quá tải hoặc dao động mạnh. Nếu P quá nhỏ, hệ thống sẽ phản ứng chậm và mất nhiều thời gian để đạt đến áp suất mục tiêu.
3.2. Thành phần tích phân I và khả năng triệt tiêu sai số
Thành phần I có nhiệm vụ cộng dồn các sai lệch theo thời gian để đưa áp suất về chính xác mức cài đặt. Trong ổn định áp suất nước, thông số I cực kỳ quan trọng vì nó giúp loại bỏ sai số xác lập. Khi thực hiện dò tham số PID, nếu thời gian tích phân quá ngắn, hệ thống sẽ bị mất ổn định và dao động liên tục quanh điểm cài đặt, gây mỏi cho các cơ cấu cơ khí.
3.3. Thành phần vi phân D và khả năng dự báo
D dựa trên tốc độ thay đổi của áp suất để đưa ra phản ứng ngăn chặn trước khi sai số trở nên quá lớn. Trong các hệ thống thủy lực như đường ống nước vốn có độ trễ nhất định, khi dò tham số PID thông số D thường được đặt rất nhỏ hoặc bằng không để tránh việc hệ thống nhạy cảm quá mức với nhiễu tín hiệu từ cảm biến áp suất.
4. Chuẩn bị trước khi tiến hành dò tham số PID
Để kết quả dò tham số PID đạt độ chính xác cao nhất, công tác chuẩn bị phần cứng và các điều kiện an toàn là không thể thiếu nhằm tránh các rủi ro đáng tiếc xảy ra trong quá trình thử nghiệm.
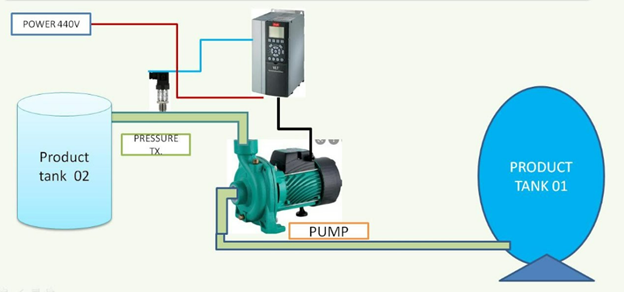
4.1. Kiểm tra phần cứng và cảm biến áp suất
Trước khi bắt đầu dò tham số PID, cần đảm bảo cảm biến áp suất đã được lắp đặt đúng vị trí, không bị rung lắc và đấu nối tín hiệu về biến tần hoặc PLC chính xác. Thang đo của cảm biến phải khớp với thông số cài đặt trong bộ điều khiển để việc dò tham số PID không bị sai lệch về giá trị vật lý.
4.2. Thiết lập các giới hạn an toàn cho đường ống
Cần cài đặt giới hạn tần số tối đa và tối thiểu cho biến tần, đồng thời thiết lập ngưỡng áp suất bảo vệ cao áp để tránh việc trong quá trình dò tham số PID, áp suất tăng đột ngột gây vỡ đường ống hoặc hỏng van. Sự an toàn của hạ tầng luôn phải được ưu tiên hàng đầu trước khi tiến hành bất kỳ thao tác thay đổi tham số điều khiển nào.
5. Quy trình dò tham số theo phương pháp Ziegler Nichols 2
Phương pháp Ziegler Nichols 2 là một kỹ thuật kinh điển giúp đơn giản hóa việc dò tham số PID thông qua các bước thực nghiệm trực tiếp trên hệ thống đang vận hành.
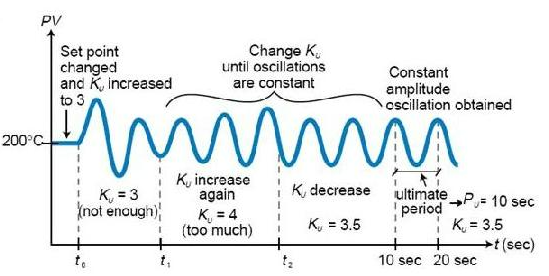
5.1. Xác định trạng thái giới hạn ổn định
Đầu tiên, hãy thiết lập giá trị I và D về mức tối thiểu (hoặc bằng không). Bắt đầu tăng dần giá trị P từ một mức nhỏ cho đến khi áp suất đường ống bắt đầu xuất hiện các dao động duy trì ổn định với biên độ không đổi. Việc dò tham số PID ở bước này giúp chúng ta tìm ra Hệ số khuếch đại tới hạn (Ku).
5.2. Đo chu kỳ dao động tới hạn
Khi hệ thống đang ở trạng thái dao động ổn định do hệ số Ku gây ra, bạn cần sử dụng đồng hồ bấm giờ hoặc đồ thị giám sát để đo khoảng thời gian giữa hai đỉnh sóng áp suất liên tiếp. Đây là một mắt xích quan trọng trong quy trình dò tham số PID, khoảng thời gian này được gọi là Chu kỳ tới hạn (Pu).
6. Công thức tính toán và áp dụng thực tế
Sau khi đã thu thập được các chỉ số thực nghiệm, bước tiếp theo trong việc dò tham số PID là áp dụng các công thức toán học để tìm ra bộ thông số làm việc chính thức cho hệ thống.
6.1. Bảng công thức tính tham số PID tiêu chuẩn
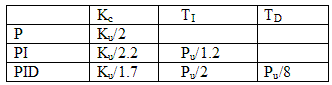
Dựa trên giá trị Ku và Pu vừa tìm được, phương pháp Ziegler Nichols 2 đưa ra công thức tính để kết thúc việc dò tham số PID cơ bản như sau:
- Hệ số P bằng 0.6 nhân với Ku
- Thời gian tích phân I bằng Pu chia cho 2
- Thời gian vi phân D bằng Pu chia cho 8
Các kết quả này cung cấp một điểm tựa vững chắc để hệ thống bắt đầu vận hành.
6.2. Điều chỉnh thực tế sau khi tính toán
Các con số từ công thức trên chỉ là giá trị khởi đầu của quá trình dò tham số PID. Đối với hệ thống nước, bạn nên ưu tiên giảm bớt giá trị P và tăng thời gian I một chút so với công thức để đảm bảo hệ thống vận hành êm ái hơn, tránh việc bơm thay đổi tốc độ quá gắt gây hại cho cơ cấu cơ khí và lãng phí điện năng không cần thiết.
7. Những lưu ý quan trọng để tối ưu hóa hệ thống
Dù đã hoàn tất dò tham số PID, hệ thống vẫn có thể gặp phải những vấn đề kỹ thuật phát sinh từ thực tế vận hành như nhiễu tín hiệu hay quá tải công suất.
7.1. Xử lý hiện tượng bão hòa tích phân
Trong điều kiện ống nước bị rò rỉ hoặc nhu cầu dùng nước vượt quá công suất bơm, việc dò tham số PID có thể bị ảnh hưởng bởi hiện tượng bão hòa tích phân (windup). Cần kích hoạt tính năng chống bão hòa tích phân (Anti-windup) trên bộ điều khiển để đảm bảo sau khi nhu cầu nước giảm xuống, hệ thống có thể quay lại trạng thái ổn định nhanh chóng.
7.2. Lọc nhiễu tín hiệu từ cảm biến áp suất
Tín hiệu từ cảm biến thường bị nhiễu do rung động của bơm, điều này làm cho kết quả dò tham số PID không phát huy được hiệu quả. Việc sử dụng một bộ lọc thông thấp cho tín hiệu đầu vào sẽ giúp bộ PID tính toán ổn định hơn, tránh việc kim áp suất nhảy liên tục dẫn đến biến tần thay đổi tần số liên tục và gây nóng động cơ.
8. Hướng dẫn cài đặt PID cho bơm áp suất với biến tần Kaman
Để hiện thực hóa những lý thuyết về dò tham số PID đã phân tích, dòng biến tần Kaman là lựa chọn tối ưu nhờ giao diện cài đặt thân thiện. Việc cấu hình đúng giúp hệ thống phản ứng linh hoạt với mọi thay đổi lưu lượng.

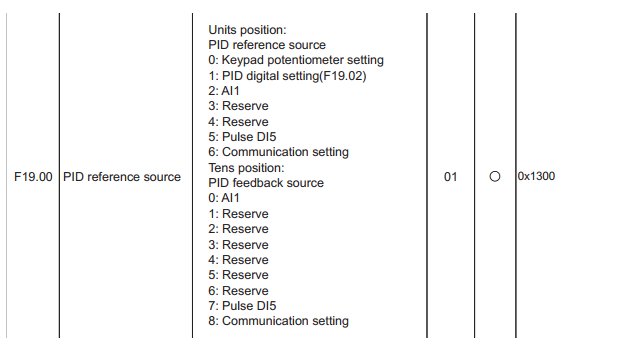
8.1. Cấu hình thông số PID trên biến tần Kaman
Khi tiến hành dò tham số PID, bạn cần truy cập vào nhóm tham số chức năng (thường là nhóm F) để khai báo nguồn đặt áp suất và nguồn phản hồi từ cảm biến. Biến tần Kaman hỗ trợ lọc nhiễu tín hiệu đầu vào rất tốt, giúp giá trị dò tham số PID luôn duy trì ở trạng thái ổn định nhất.
8.2. Tối ưu hóa vận hành và tài liệu kỹ thuật
Sau khi nhập các hệ số P, I, D tìm được từ phương pháp Ziegler-Nichols, bạn nên kiểm tra tính năng “ngủ” (Sleep mode) để tiết kiệm điện. Như chúng tôi đã trình bày ở các phần trên, việc tinh chỉnh này là bước cuối cùng để hoàn thiện hệ thống.
Để xem chi tiết sơ đồ đấu nối và bảng mã thông số cài đặt cụ thể, bạn có thể xem ngay bài viết: CÀI ĐẶT CHỨC NĂNG PID CHO BƠM ÁP SUẤT BIẾN TẦN KAMAN KM20 của Tự Động Hóa Toàn Cầu.
Việc sở hữu một bộ thông số chuẩn sau khi dò tham số PID sẽ giúp biến tần Kaman phát huy tối đa hiệu suất, đảm bảo áp suất đường ống luôn hằng định và êm ái.
9. Kết luận về việc ổn định áp suất đường ống nước
Việc dò tham số PID cho hệ thống áp suất nước là một quá trình đòi hỏi sự kiên nhẫn và quan sát thực tế kỹ lưỡng. Sử dụng phương pháp Ziegler Nichols 2 giúp kỹ thuật viên có một nền tảng khoa học để tìm ra bộ tham số tối ưu thay vì dò dẫm một cách cảm tính. Một bộ tham số PID tốt không chỉ giữ áp suất ổn định tại mọi thời điểm mà còn giúp kéo dài tuổi thọ cho hệ thống máy bơm và toàn bộ hạ tầng đường ống. Hãy luôn nhớ rằng trong ứng dụng nước, sự ổn định lâu dài quan trọng hơn tốc độ đáp ứng tức thời.

Để đạt được hiệu quả vận hành cao nhất cho hệ thống tự động hóa, việc lựa chọn thiết bị điều khiển chất lượng là vô cùng quan trọng. Công ty Cổ phần Tự Động Hóa Toàn Cầu là địa chỉ cung cấp thiết bị uy tín hàng đầu, chuyên cung cấp các dòng biến tần và bộ điều khiển hỗ trợ tính năng dò tham số PID thông minh. Với đội ngũ kỹ thuật giàu kinh nghiệm, chúng tôi không chỉ cung cấp sản phẩm chính hãng mà còn mang đến dịch vụ hậu mãi vượt trội, hỗ trợ tư vấn và hướng dẫn kỹ thuật tận tình cho khách hàng doanh nghiệp. Các giải pháp của chúng tôi giúp tối ưu hóa khả năng dò tham số PID, đảm bảo hệ thống truyền động vận hành êm ái, bền bỉ và tiết kiệm chi phí nhất. Hãy liên hệ với chúng tôi để nhận những tư vấn chuyên sâu nhất cho yêu cầu của bạn.
THÔNG TIN LIÊN HỆ
- Hotline Zalo miền Bắc: 0961.320.333
- Hotline Zalo miền Nam: 0931.866.800
- Website: tudonghoatoancau.com
- Facebook: Tự động hóa Toàn Cầu
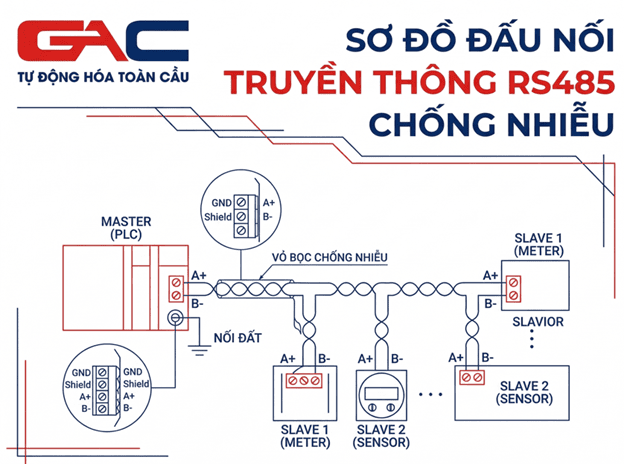
Xem thêm: Cách Đấu Nối Truyền Thông RS485 Chống Nhiễu Chuẩn Kỹ Thuật


 Zalo Miền Bắc
Zalo Miền Bắc