



Lệnh A_STOP Dừng Khẩn Cấp Trục Qua Ethercat
Trong các hệ thống tự động hóa công nghiệp, khả năng dừng trục servo một cách an toàn và nhanh chóng trong tình huống khẩn cấp là vô cùng quan trọng. Lệnh A_STOP được thiết kế đặc biệt cho mục đích này, cho phép bạn dừng tức thời một hoặc nhiều trục đang trong trạng thái chuyển động. Bài viết này sẽ đi sâu vào cú pháp, các tham số, các chế độ dừng khác nhau, ví dụ thực tế và tầm quan trọng của lệnh A_STOP trong môi trường EtherCAT.
Lệnh A_STOP là gì? Lệnh dừng khẩn cấp trục Servo
A_STOP (Axis Stop) là một lệnh cơ bản nhưng cực kỳ quan trọng trong lập trình PLC điều khiển các hệ thống servo thông qua mạng EtherCAT. Chức năng chính của nó là dừng một trục đang di chuyển, thường là trong các tình huống cần dừng nhanh, dừng khẩn cấp hoặc khi cần chuyển sang chế độ thủ công.
Lệnh A_STOP thường được kích hoạt bằng xung sườn (rising edge), nghĩa là nó chỉ thực thi khi tín hiệu điều khiển chuyển từ trạng thái OFF sang ON. Tuy nhiên, trong các ví dụ E-Stop, nó có thể được kích hoạt liên tục cho đến khi nguy hiểm được loại bỏ.
Cú pháp lệnh A_STOP và giải thích tham số chi tiết
Cú pháp:
A_STOP S0 S1 S2 S3
Giải thích các toán hạng (tham số):
| Toán hạng | Tên | Kiểu dữ liệu | Đơn vị | Ghi chú |
| S0 | Deceleration | FP64 |
Command unit/s^2 | Giảm tốc trục: Đây là giá trị giảm tốc mà trục sẽ áp dụng để dừng lại. Giá trị càng lớn, trục sẽ dừng càng nhanh nhưng có thể gây ra lực quán tính lớn hơn và gây sốc cơ khí. Giá trị nhỏ hơn giúp dừng êm hơn nhưng mất nhiều thời gian hơn. |
| S0+4 | Jerk | FP64 |
Command unit/s^3 | Rung giật (Jerk): Là tốc độ thay đổi của gia tốc/giảm tốc. Kiểm soát Jerk giúp quá trình dừng diễn ra mượt mà hơn, giảm thiểu rung động và hao mòn cơ khí. Giá trị Jerk thấp sẽ tạo ra đường cong dừng mềm mại, tránh dừng đột ngột gây giật. |
| S0+8 | StopMode | INT16U |
Chế độ dừng: Đây là tham số quan trọng nhất của lệnh A_STOP, xác định cách thức trục sẽ dừng: • 0: Dừng giảm tốc (Deceleration Stop). Trục sẽ giảm tốc theo giá trị Deceleration đã đặt cho đến khi dừng hoàn toàn. Đây là chế độ dừng mềm mại và có kiểm soát nhất.• 1: Dừng khẩn cấp (Emergency Stop). Trục sẽ dừng với giảm tốc tối đa mà driver cho phép (hoặc giảm tốc đã đặt nếu nó cao hơn). Chế độ này thường không quan tâm đến độ êm ái mà ưu tiên dừng nhanh nhất có thể.• 2: Dừng khẩn cấp và tắt kích hoạt trục (Emergency Stop and Disable Axis). Tương tự như chế độ 1 nhưng sau khi dừng, driver servo sẽ bị tắt nguồn (Servo OFF), loại bỏ hoàn toàn mô-men xoắn trên trục. Đây là chế độ an toàn nhất trong các tình huống nguy hiểm thực sự. |
|
| S1 | ErrCode | INT16U |
Mã lỗi: Thanh ghi 16-bit không dấu dùng để báo cáo mã lỗi nếu quá trình dừng gặp sự cố. Việc kiểm tra giá trị của S1 giúp bạn chẩn đoán nguyên nhân lỗi một cách nhanh chóng. | |
| S2 | Done | Bool |
Hoàn thành: Bit này sẽ chuyển sang ON (logic 1) khi lệnh A_STOP đã được thực thi thành công và trục đã dừng lại. Bạn có thể sử dụng bit này làm cờ báo hoàn thành trong chương trình PLC. | |
| S2+1 | Busy | Bool |
Đang thực thi: Bit này sẽ ON trong suốt quá trình lệnh A_STOP đang được thực thi (trục đang giảm tốc để dừng). Nó sẽ OFF khi quá trình dừng kết thúc. | |
| S2+2 | Abort | Bool |
Bị gián đoạn: Bit này sẽ ON nếu quá trình dừng bị gián đoạn hoặc hủy bỏ đột ngột do một nguyên nhân bên ngoài (ví dụ: một lệnh mới ghi đè lên, lỗi E-Stop phần cứng khác kích hoạt). | |
| S2+3 | Error | Bool |
Bị lỗi: Bit này sẽ ON nếu quá trình dừng kết thúc nhưng gặp lỗi (ví dụ: không thể dừng, quá dòng, lỗi giới hạn). Khi bit này ON, bạn cần kiểm tra S1 (ErrCode) để biết mã lỗi cụ thể. | |
| S3 | Axis | INT16U |
ID trục tác động: Đây là số ID của trục servo mà bạn muốn dừng (ví dụ: Trục 0, Trục 1, v.v.). Điều này cho phép bạn kiểm soát việc dừng từng trục riêng biệt hoặc nhiều trục cùng lúc. |
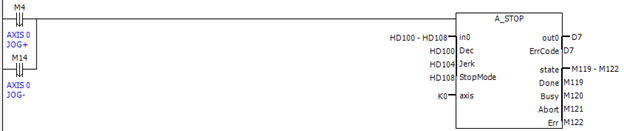
Ví dụ thực tế: Dừng trục 0 bằng lệnh A_STOP
Giả sử chúng ta muốn dừng trục servo ID 0 khi có tín hiệu dừng từ M4 hoặc M14.
// Kích hoạt lệnh A_STOP cho Trục 0
// Khi M4 hoặc M14 chuyển trạng thái từ ON thành OFF, trục servo ID0 sẽ dừng lại.
// (Lưu ý: Ví dụ này mô tả logic, PLC thực tế cần có thêm cơ chế kiểm tra tín hiệu)
// Giả định:
// - M4 là nút dừng thông thường (Stop Push Button)
// - M14 là cảm biến an toàn hoặc tín hiệu khẩn cấp
// - Chúng ta muốn dừng khẩn cấp và tắt kích hoạt trục (StopMode = 2)
+--------------+ +----------------------------------------------------+
| NOT M4 | | A_STOP |
| (Tín hiệu | | D_DECEL D_JERK D_MODE D100 M200 K0 |
| dừng 1) | | (Decel, Jerk, StopMode, ErrCode, Done/Busy/Abort/Error, Axis 0) |
+-------+------+ +----------------------------------------------------+
|
+-- OR --+
| |
+-------+------+
| NOT M14 |
| (Tín hiệu |
| dừng 2) |
+--------------+
Giải thích ví dụ:
- Trong ví dụ này, chúng ta sử dụng logic NOT M4 và NOT M14. Điều này có nghĩa là khi
M4hoặcM14chuyển từ trạng thái ON sang OFF (ví dụ, một nút nhấn dừng được nhả ra hoặc một rơ le an toàn bị ngắt), tín hiệu đầu vào cho lệnh A_STOP sẽ được kích hoạt. - Khi tín hiệu kích hoạt lệnh A_STOP (từ NOT M4 hoặc NOT M14) là ON, lệnh A_STOP cho trục 0 sẽ được thực thi.
- Các tham số cần cài đặt:
D_DECEL: Thanh ghi chứa giá trị giảm tốc (ví dụ: 10000 command unit/s^2).D_JERK: Thanh ghi chứa giá trị Jerk (ví dụ: 100000 command unit/s^3).D_MODE: Thanh ghi chứa giá trị2(chế độ dừng khẩn cấp và tắt kích hoạt trục).D100: Thanh ghi kiểm tra lỗi (ErrCode).M200: Bit trạng thái cho quá trình thực thi lệnh (Done/Busy/Abort/Error).K0: Chỉ định trục 0.
- Ngay lập tức, trục 0 đang chuyển động sẽ bắt đầu giảm tốc mạnh theo các thông số đã đặt.
- Sau khi trục dừng hoàn toàn, nếu
StopModelà2, driver servo của trục 0 sẽ tự động bị tắt kích hoạt (Servo OFF), loại bỏ mọi mô-men xoắn trên trục, đảm bảo an toàn tối đa. - Bit
M200(Done) sẽ ON khi quá trình dừng hoàn tất, vàM200+1(Busy) sẽ OFF.
Code mẫu sử dụng lệnh A_STOP: Download
Các chế độ dừng của A_STOP và ứng dụng thực tế
Lệnh A_STOP cung cấp ba chế độ dừng linh hoạt, phù hợp với các tình huống khác nhau:
- Chế độ 0: Dừng giảm tốc (Deceleration Stop)
- Mô tả: Trục dừng một cách có kiểm soát, sử dụng giá trị giảm tốc và Jerk đã đặt. Đây là chế độ dừng thông thường, ưu tiên sự êm ái và ít gây sốc cơ khí.
- Ứng dụng: Dừng trục trong các chu trình hoạt động bình thường, tạm dừng quá trình, hoặc khi cần chuyển chế độ hoạt động nhưng không yêu cầu dừng khẩn cấp.
- Chế độ 1: Dừng khẩn cấp (Emergency Stop)
- Mô tả: Trục dừng nhanh nhất có thể, sử dụng giảm tốc tối đa cho phép của hệ thống (thường là giảm tốc định mức của driver hoặc giá trị Deceleration rất cao nếu được đặt). Độ êm ái không phải là ưu tiên hàng đầu.
- Ứng dụng: Dừng máy trong các tình huống nguy hiểm tiềm tàng, phát hiện vật cản bất ngờ, hoặc khi cần phản ứng nhanh để tránh va chạm.
- Chế độ 2: Dừng khẩn cấp và tắt kích hoạt trục (Emergency Stop and Disable Axis)
- Mô tả: Sau khi dừng khẩn cấp (như chế độ 1), driver servo sẽ tự động ngắt nguồn (Servo OFF). Điều này đảm bảo rằng không còn bất kỳ lực mô-men xoắn nào trên trục, trục hoàn toàn tự do.
- Ứng dụng: Đây là chế độ dừng an toàn nhất, thường được kích hoạt bởi các nút dừng khẩn cấp (E-Stop) vật lý, cảm biến an toàn hoặc khi xảy ra lỗi nghiêm trọng đòi hỏi cô lập hoàn toàn trục khỏi nguồn động lực.
Tầm quan trọng của A_STOP trong hệ thống EtherCAT:
- Phản ứng nhanh: Mạng EtherCAT đảm bảo tín hiệu dừng được truyền tải với độ trễ cực thấp, cho phép trục phản ứng và dừng lại gần như tức thì, điều này cực kỳ quan trọng trong các tình huống khẩn cấp.
- An toàn tối đa: Việc kiểm soát chặt chẽ các chế độ dừng (đặc biệt là chế độ 2) giúp đảm bảo an toàn cho người vận hành và bảo vệ thiết bị trong các sự cố.
- Kiểm soát linh hoạt: Khả năng chọn giảm tốc, Jerk và các chế độ dừng khác nhau cho phép lập trình viên tùy chỉnh hành vi dừng cho từng ứng dụng cụ thể.
- Chẩn đoán hiệu quả: Các bit trạng thái (Done, Busy, Abort, Error) và thanh ghi lỗi (ErrCode) cung cấp phản hồi chi tiết, giúp dễ dàng chẩn đoán và khắc phục sự cố.
Khắc phục sự cố khi A_STOP gặp lỗi
Nếu lệnh A_STOP không hoạt động như mong đợi hoặc bit S2+3 (Error) ON, hãy kiểm tra các điểm sau:
- Kiểm tra S1 (ErrCode): Luôn là bước đầu tiên. Mã lỗi sẽ cung cấp thông tin chi tiết về nguyên nhân gây lỗi (ví dụ: trục đã dừng, lỗi phần cứng, lỗi truyền thông). Tham khảo tài liệu PLC và driver servo để tra cứu.
- Đảm bảo trục đang chuyển động: Lệnh A_STOP chỉ có tác dụng khi trục đang thực sự di chuyển. Nếu trục đã dừng, lệnh có thể báo lỗi hoặc không có tác dụng.
- Kiểm tra nguồn cấp và trạng thái Servo ON: Đảm bảo driver servo đã được cấp nguồn và ở trạng thái Servo ON trước khi cố gắng dừng (trừ khi bạn dùng StopMode 2).
- Kiểm tra tín hiệu kích hoạt: Đảm bảo tín hiệu kích hoạt lệnh A_STOP (ví dụ: M4, M14) hoạt động đúng như mong đợi và không bị kẹt.
- Giới hạn thông số: Đảm bảo các giá trị Deceleration và Jerk nằm trong giới hạn cho phép của driver servo và cơ cấu cơ khí.
- Lỗi bên trong driver: Nếu mọi thứ đều đúng, có thể lỗi nằm ở chính driver servo. Cần kiểm tra trạng thái báo lỗi của driver thông qua đèn LED hoặc phần mềm chẩn đoán.
Kết luận
Lệnh A_STOP là một phần không thể thiếu của mọi hệ thống điều khiển chuyển động an toàn và hiệu quả sử dụng EtherCAT. Bằng cách hiểu rõ các chế độ dừng, tùy chỉnh thông số giảm tốc và Jerk, cùng với việc giám sát trạng thái lệnh, bạn có thể đảm bảo các trục servo dừng lại một cách nhanh chóng, an toàn và có kiểm soát trong mọi tình huống, từ dừng thông thường đến dừng khẩn cấp.
Bạn cần hỗ trợ chuyên sâu về lệnh A_STOP hoặc các vấn đề PLC/Servo EtherCAT khác?
Hãy liên hệ ngay với đội ngũ kỹ thuật của chúng tôi để được tư vấn và hỗ trợ nhanh chóng:
- Hotline miền Bắc: 0961.320.333
- Hotline miền Nam: 0981.810.800
- Fanpage hỗ trợ: facebook.com/Congtytudonghoatoancau
- Website: tudonghoatoacau.com

 Zalo Miền Bắc
Zalo Miền Bắc