



Lệnh A_Write Chỉnh Sửa Vị Trí Trục Qua Ethercat
Trong các hệ thống điều khiển chuyển động hiện đại, việc điều chỉnh và thiết lập vị trí của trục servo là một trong những thao tác cơ bản và quan trọng nhất. Lệnh A_WRITE đóng vai trò thiết yếu trong việc này, cho phép lập trình viên thay đổi vị trí hiện tại của trục một cách linh hoạt, dù là theo tọa độ tuyệt đối hay tương đối. Bài viết này sẽ đi sâu vào cú pháp, các tham số, ví dụ thực tế và tầm quan trọng của lệnh A_WRITE trong môi trường EtherCAT.
A_WRITE là gì? Lệnh chỉnh sửa vị trí trục Servo
A_WRITE (Axis Write) là một lệnh chuyên dụng trong các bộ điều khiển lập trình (PLC) hỗ trợ mạng EtherCAT, được sử dụng để thiết lập hoặc điều chỉnh vị trí hiện tại của một trục servo đã được chỉ định. Đây là lệnh thường được dùng để cài đặt một vị trí ban đầu, hiệu chỉnh tọa độ sau khi về gốc (homing) hoặc điều chỉnh vị trí trong các ứng dụng phức tạp.
Lệnh A_WRITE thường được kích hoạt bằng xung sườn (rising edge), nghĩa là nó chỉ thực thi khi tín hiệu điều khiển chuyển từ trạng thái OFF sang ON.
Cú pháp lệnh A_WRITE và giải thích tham số
Cú pháp:
A_WRITE S0 S1 S2 S3Giải thích các toán hạng (tham số):
Ví dụ thực tế: Chỉnh sửa vị trí hiện tại của trục 0
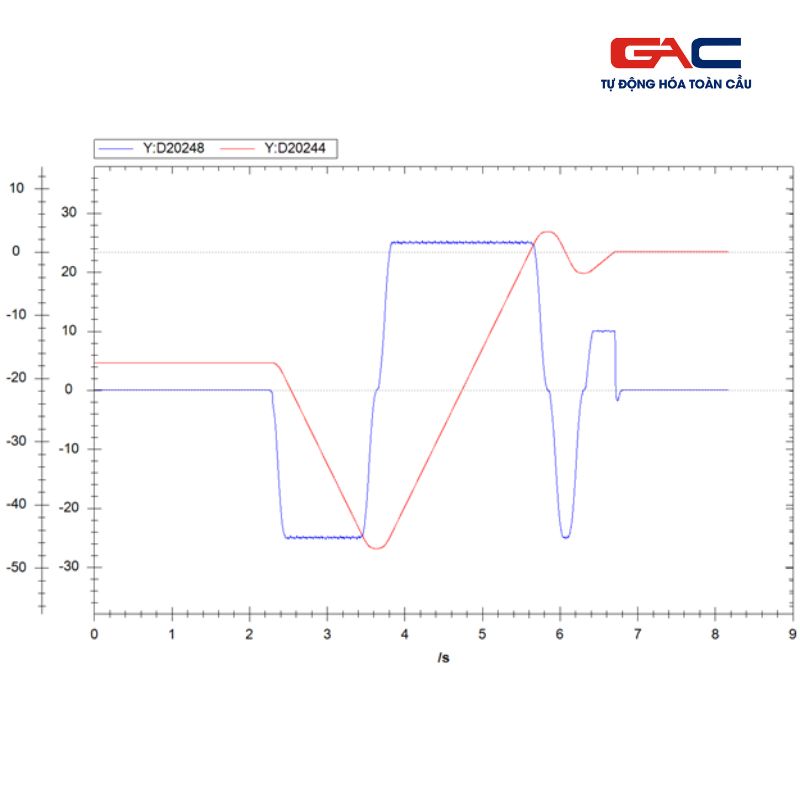
Giả sử chúng ta muốn chỉnh sửa vị trí hiện tại của trục 0. Thanh ghi D20044 là nơi lưu trữ vị trí hiện tại của trục 0. Chúng ta sẽ sử dụng biến HD10 để cấp giá trị vị trí mới.
// Kích hoạt lệnh A_WRITE cho Trục 0
// Khi M2 ON, lệnh A_WRITE được thực thi
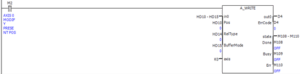
+-------+ +------------------------------------+
| | | A_WRITE |
| M2 +-------+ HD10 D(MODE) D(BUFFER) D100 M200 K0 |
| (Input)| | (Position, Mode, Buffer, ErrCode, Done/Busy/Error, Axis 0) |
+-------+ +------------------------------------+
Trong đó:
HD10: Đây là giá trị vị trí mà bạn muốn thiết lập (có thể là tuyệt đối hoặc tương đối).D(MODE): Địa chỉ thanh ghi/bit chứa giá trị0(tuyệt đối) hoặc1(tương đối).D(BUFFER): Địa chỉ thanh ghi/bit cho BufferMode (thường để 0 hoặc bỏ qua nếu không hỗ trợ).D100: Thanh ghi 16-bit để kiểm tra trạng thái lỗi (ErrCode) của trục 0.M200: Bit trạng thái cho quá trình thực thi lệnh (Done/Busy/Error).K0: Chỉ định trục 0.
Chế độ tuyệt đối (Mode = 0):
- Cài đặt: Gán giá trị
0vào thanh ghi/bitD(MODE). - Hoạt động: Khi lệnh A_WRITE được kích hoạt, giá trị trong thanh ghi
HD10sẽ được gán trực tiếp vào vị trí hiện tại của trục 0. - Ví dụ: Nếu
HD10 = 5000vàD(MODE) = 0, sau khi lệnh thực thi,D20044(vị trí hiện tại của trục 0) sẽ bằng5000, bất kể vị trí trước đó của trục là bao nhiêu. - Công thức:
D20044 (sau) = HD10
Chế độ tương đối (Mode = 1):
- Cài đặt: Gán giá trị
1vào thanh ghi/bitD(MODE). - Hoạt động: Khi lệnh A_WRITE được kích hoạt, giá trị trong thanh ghi
HD10sẽ được cộng vào vị trí hiện tại của trục 0 trước khi lệnh được gọi. - Ví dụ: Nếu
HD10 = 1000vàD(MODE) = 1, giả sửD20044(vị trí hiện tại của trục 0) đang là20000trước khi lệnh A_WRITE kích hoạt. Sau khi lệnh thực thi, vị trí mới của trục 0 sẽ là20000 + 1000 = 21000. - Công thức:
D20044 (sau) = D20044 (trước) + HD10
Code mẫu sử dụng lệnh A_WRITE: Download
Ứng dụng và tầm quan trọng của A_WRITE
Lệnh A_WRITE là một công cụ linh hoạt, được sử dụng trong nhiều tình huống khác nhau trong điều khiển chuyển động:
- Đặt lại vị trí gốc ảo: Sau khi Homing (sử dụng A_ZRN), đôi khi cần điều chỉnh vị trí 0 thực tế của trục theo một giá trị offset nhất định. A_WRITE ở chế độ tuyệt đối là lựa chọn lý tưởng cho việc này.
- Hiệu chỉnh vị trí thủ công: Trong quá trình vận hành, người vận hành có thể cần hiệu chỉnh vị trí trục một lượng nhỏ để khớp với một điểm tham chiếu vật lý. A_WRITE ở chế độ tương đối rất hữu ích cho các điều chỉnh gia tăng.
- Thay đổi tọa độ trong quá trình chuyển đổi: Khi chuyển đổi giữa các hệ tọa độ hoặc các chế độ điều khiển, A_WRITE có thể được dùng để đồng bộ vị trí trục với hệ tọa độ mới.
- Tạo điểm tham chiếu tạm thời: Thiết lập một vị trí cụ thể làm điểm dừng hoặc điểm kiểm tra tạm thời trong quá trình vận hành hoặc thử nghiệm.
Lợi ích trong hệ thống EtherCAT:
- Tốc độ phản hồi cao: Mạng EtherCAT đảm bảo lệnh A_WRITE được truyền tải và thực thi với độ trễ tối thiểu, cho phép điều chỉnh vị trí tức thời.
- Đồng bộ hóa: Trong các hệ thống đa trục, khả năng đồng bộ của EtherCAT đảm bảo việc thiết lập vị trí cho các trục diễn ra đồng thời, duy trì sự phối hợp chính xác.
- Độ chính xác cao: Với kiểu dữ liệu
FP64và khả năng truyền thông ổn định của EtherCAT, A_WRITE giúp thiết lập vị trí với độ phân giải và độ chính xác tối ưu.
Khắc phục sự cố khi A_WRITE gặp lỗi
Nếu lệnh A_WRITE không hoạt động như mong đợi hoặc bit S2+2 (Error) ON, hãy kiểm tra các điểm sau:
- Kiểm tra S1 (ErrCode): Mã lỗi sẽ chỉ ra nguyên nhân cụ thể (ví dụ: lỗi giá trị, trục không sẵn sàng, lỗi truyền thông). Tham khảo tài liệu hướng dẫn của PLC và driver servo để tra cứu ý nghĩa mã lỗi.
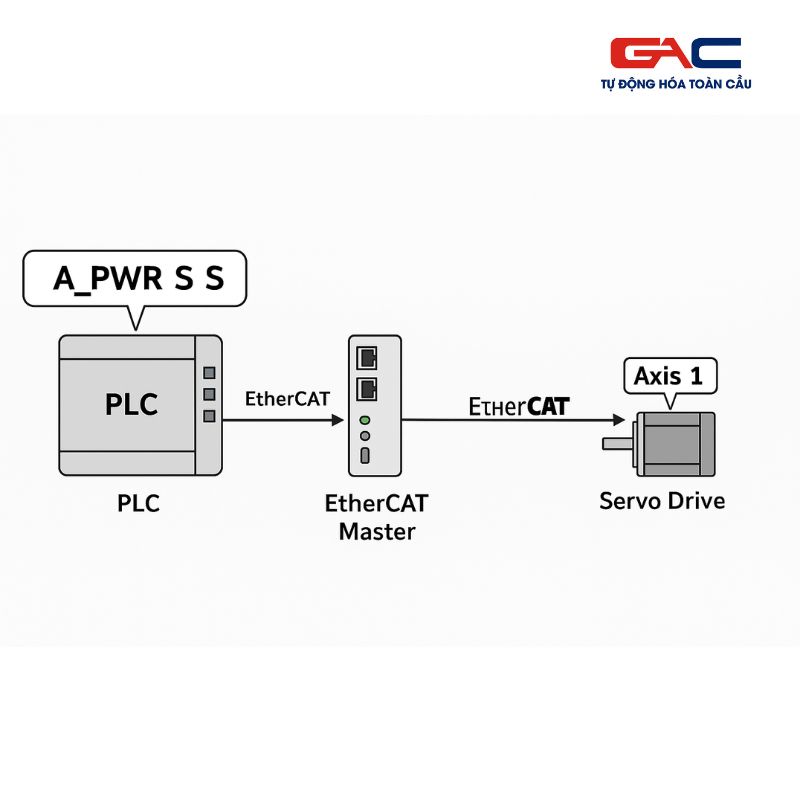
- Đảm bảo Servo đã ON: Lệnh A_WRITE chỉ có thể thực thi khi driver servo đã được cấp nguồn và sẵn sàng hoạt động (Servo ON, sử dụng lệnh A_PWR).
- Kiểm tra giá trị đầu vào (S0, S0+4): Đảm bảo giá trị Position (
S0) và Mode (S0+4) được thiết lập chính xác và phù hợp với yêu cầu. - Kiểm tra trạng thái trục: Đảm bảo trục không đang ở trạng thái lỗi (Alarm) hoặc đang thực hiện một lệnh chuyển động khác.
Kết luận
Lệnh A_WRITE là một công cụ mạnh mẽ và linh hoạt để điều chỉnh vị trí trục servo qua mạng EtherCAT. Việc hiểu rõ cú pháp, cách sử dụng các chế độ tuyệt đối và tương đối, cùng với việc kiểm tra các bit trạng thái và lỗi, sẽ giúp bạn tối ưu hóa việc điều khiển chuyển động, nâng cao độ chính xác và hiệu quả cho hệ thống tự động hóa của mình.
Cần hỗ trợ kỹ thuật chuyên sâu về lệnh A_WRITE hoặc các vấn đề PLC/Servo EtherCAT khác?
Đừng ngần ngại liên hệ với đội ngũ kỹ thuật của chúng tôi để được tư vấn và hỗ trợ nhanh chóng:
- Hotline miền Bắc: 0961.320.333
- Hotline miền Nam: 0981.810.800
- Fanpage hỗ trợ: facebook.com/Congtytudonghoatoancau
- Website: tudonghoatoacau.com


 Zalo Miền Bắc
Zalo Miền Bắc