



Sử Dụng Lệnh Về Gốc Trục Qua Mạng Ethercat A_ZRN
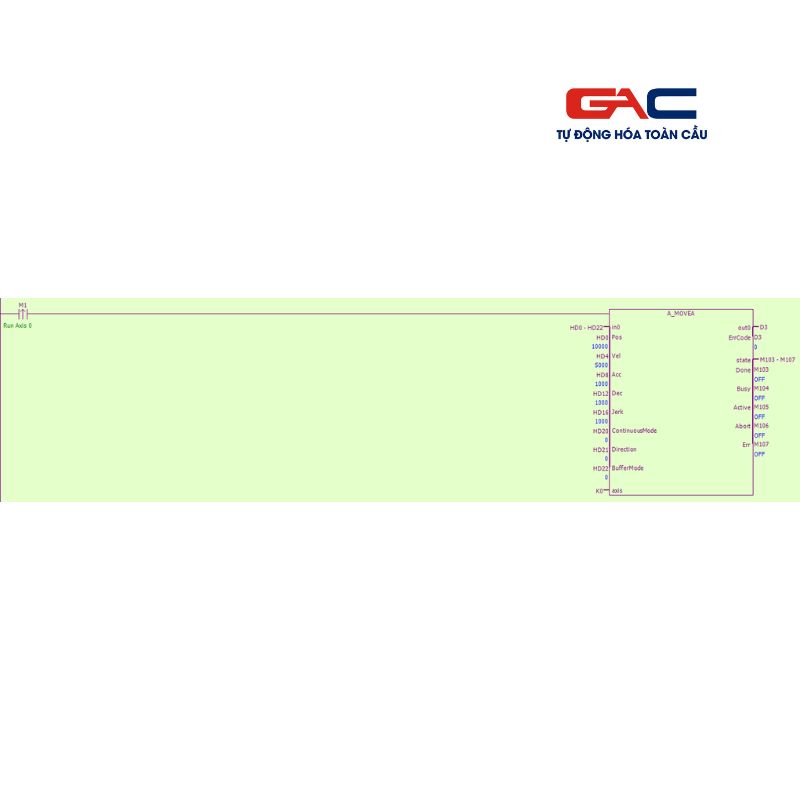
Trong các hệ thống điều khiển chuyển động sử dụng mạng EtherCAT, việc định vị chính xác điểm gốc tọa độ (Home Position) cho mỗi trục servo là bước cực kỳ quan trọng. Nó đảm bảo độ chính xác, tính lặp lại và an toàn trong mọi hoạt động sau này. Lệnh A_ZRN (Axis Zero Return) là công cụ chuyên dụng để thực hiện quá trình này. Bài viết này sẽ đi sâu vào cú pháp, các tham số quan trọng, những cài đặt cần thiết và ví dụ thực tế về việc sử dụng lệnh A_ZRN.



 Zalo Miền Bắc
Zalo Miền Bắc
